



力平衡式压力(差压)变送器
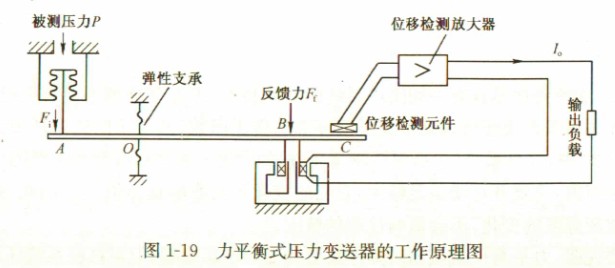
力平衡式压力变送器的工作原理如图1-19所示。被测压力P经波纹管转换为力Fi作用于杠杆左端A点,使杠杆绕支点O作逆时针旋转,稍一偏转,位于杠杆右端的位移检测元件便有感觉,使电子放大器产生一定的输出电流Io。此电流流过反馈线圈和变送器的负载,并与永久磁铁作用产生一定的电磁力,使杠杆B点受到反馈力Ff,形成一个使杠杆做顺时针转动的反力矩。由于位移检测放大器极其灵敏,杠杆实际上只要产生极微小的位移,放大器便有足够的输出电流形成反力矩与作用力矩相平衡。当杠杆处于平衡状态时,输出电流Io正比于被测压力P。
这种闭环的力平衡结构的优点,首先在于当弹性材料的弹性模数温度系数较大时,可以减小温度的影响。因为这里的平衡状态不是靠弹性元件的弹性反力来建立的,当位移检测放大器非常灵敏时,杠杆的位移量很小,若整个弹性系统的刚度设计得很小,那么弹性反力在平衡状态的建立中无足轻重,可以忽略不计。这样,弹性元件的弹性力随温度的漂移就不会影响这类变送器的精度。此外,由于变换过程中位移量很小,弹性元件的受力面积能保持恒定,因而线性度也比较好。由于位移量小,还可减少弹性迟滞现象,减小仪表的变差。
为了说明上述道理,可画出这种变送器的方块图如图1-20所示。被测压力Pi乘以波纹管的有效面积S便得到作用于A点的力Fi,此力再乘以对支点O的距离lOA即为作用力矩
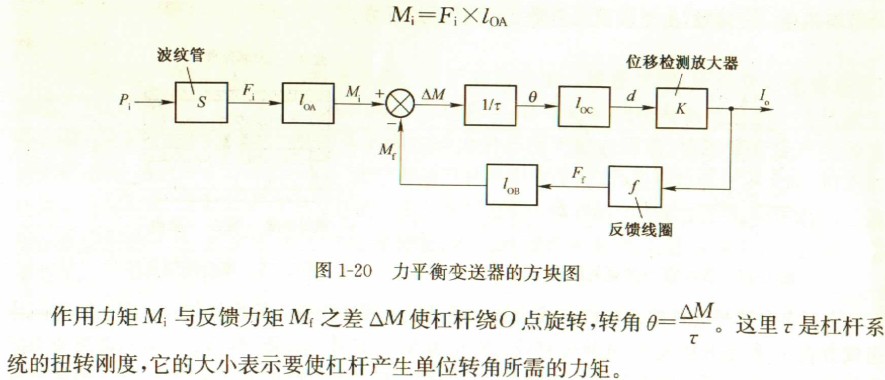
当杠杆转动时,位移检测点C处就有位移d=lOC×θ,其中lOC为检测点C到支点O的距离。该位移被检测,并转换为电流输出Io。图中K表示位移检测放大器的传递系数。
输出电流Io流过反馈线圈,产生电磁反馈力Ff=f×Io,其中I为电磁铁的传递系数。此力乘以力臂lOB即为反馈力矩Mf。
由图1-20可写出其闭环传递函数

由此可知,这种变送器具有一切闭环系统的共同特点,即在开环增益足够大时,其输入量与输出量间的关系只取决于输入环节及反馈环节的传递函数,而与正向通道环节的传递函数无关。在图1-20中,杠杆系统(包括弹性测量元件)的刚度τ和位移检测放大器的传递系数K都处于正向通道内,只要开环增益足够大,它们的变化不会影响输出值Io。因此,弹性测量元件的弹性模数随温度的变化,不会影响仪表的精度。
这里需要说明,力平衡仪表虽然对弹性反力的变化不甚敏感,但对杠杆系统任何一处存在的摩擦力却是十分敏感的,因为摩擦力矩的引人相当于在比较点引人干扰,会直接引起误差,造成死区和变差。为此,力平衡仪表中支承点都使用弹簧钢片做成弹性支承,以避免摩擦力的引入。
从上面的分析看到,在力平衡变送器中,只要测压元件的有效面积S能保持恒定,磁铁的磁场强度均匀稳定,力臂的长度lOA、lOB不变,便可得到较好的变换精度。
本文来自:www.sbnyb.com
15312303908
